「論理回路とその設計」 演習問題【18】
[A] 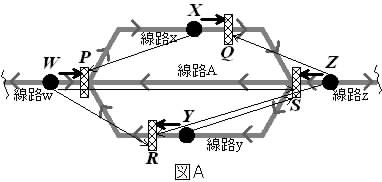 図Aで示すように,5本の単線線路 A, w, x, y, z が(連結して)ある.線路 w と z では左右両方向進行可,A と y では左一方進行のみ,x では右一方進行のみ,それぞれ可である.また,線路 w, x, y, z 上には各1台の列車のみが存在できて,列車は,地点 W, X, Y, Z 上で,進行方向にある信号を確認するために停止する. ただし,線路 A では,列車は停止せずに左一方進行で w へ向かって通過する. いったん停止する列車は,地点 W では x を進行先とする右進行,X では z を進行先とする右進行,Y では w を進行先とする左進行,Z では A または y を進行先とする左進行,とする.従って,「地点 W, X, Y, Z 上に列車が停止(存在)しているか否か」は,各地点での列車の有無を表す論理値として,「列車無し」を"0",「列車有り」を"1"とすることで,表現できる. また,W, X, Y, Z 地点にある各列車は,それぞれ,各地点にある進行方向側の信号 P, Q, R, S で,進行方向へ「進行不可」(「停止(赤)」,"0")か「進行可」(「進行(青)」,"1")かを確認(図Aでの太線矢印)する. ただし,「Z に有る( Z =1 )左進行列車は,W =0 ならば,Y に優先して( Y に列車が有っても,その列車は R の停止信号で停止したまま(*)),A を通過(経由)して w へ,W =1 かつ Y =0 ならば y へ,それぞれ自動的に分岐し左進行する」ように信号 S を「進行(青)」("1")に制御する.
図Aで示すように,5本の単線線路 A, w, x, y, z が(連結して)ある.線路 w と z では左右両方向進行可,A と y では左一方進行のみ,x では右一方進行のみ,それぞれ可である.また,線路 w, x, y, z 上には各1台の列車のみが存在できて,列車は,地点 W, X, Y, Z 上で,進行方向にある信号を確認するために停止する. ただし,線路 A では,列車は停止せずに左一方進行で w へ向かって通過する. いったん停止する列車は,地点 W では x を進行先とする右進行,X では z を進行先とする右進行,Y では w を進行先とする左進行,Z では A または y を進行先とする左進行,とする.従って,「地点 W, X, Y, Z 上に列車が停止(存在)しているか否か」は,各地点での列車の有無を表す論理値として,「列車無し」を"0",「列車有り」を"1"とすることで,表現できる. また,W, X, Y, Z 地点にある各列車は,それぞれ,各地点にある進行方向側の信号 P, Q, R, S で,進行方向へ「進行不可」(「停止(赤)」,"0")か「進行可」(「進行(青)」,"1")かを確認(図Aでの太線矢印)する. ただし,「Z に有る( Z =1 )左進行列車は,W =0 ならば,Y に優先して( Y に列車が有っても,その列車は R の停止信号で停止したまま(*)),A を通過(経由)して w へ,W =1 かつ Y =0 ならば y へ,それぞれ自動的に分岐し左進行する」ように信号 S を「進行(青)」("1")に制御する.
このとき,各信号 P, Q, R, S を,進行先の線路上の地点W, X, Y, Z における各列車の(その時点での)有無(図Aでの細線矢印)のみによって,すなわち,「 P は X =0 (無)で"1"(青),X =1 (有)で"0"(赤),Q は Z =0 (無)で"1"(青),Z =1 (有)で"0"(赤),R は(*)を考慮して W =0 (無)かつ Z =0 (無)で"1"(青),それ以外で"0"(赤),S は W =0 (無)または Y =0 (無)で"1"(青),それ以外で"0"(赤)」(制御規則A)で制御する.
地点 W, X, Y, Z に有る列車が確認する信号 P, Q, R, S の制御規則Aによる列車制御機構を,「W, X, Y, Z を入力, P, Q, R, S を出力とする4入力4出力組み合わせ回路」として最適化設計してみよう. 次の(1)〜(8)の各問に答えなさい.(論理積(AND)記号"・"は省略しなさい.)
(1) 制御規則Aの論理を下記の真理値表に写す. この真理値表の P, Q, R, S 列(左4列)を埋めなさい.
(2) (1)の真理値表から各出力 P, Q, R, S を解答欄のカルノー図に写し,それを用いて各出力 P, Q, R, S を2段論理最小化し,最小積和形論理式で示しなさい.カルノー図による操作はすべて解答として明記しなさい.
(3) (2)のP, Q, R, S それぞれが「多段論理最小化できるか否か」について,(2)の解答を引用して,簡潔に述べなさい.
(4) (2)の P, Q, R, S を1つにまとめた4出力論理回路における「共用(共有)AND/ORゲートの有無」について,(2)の解答を引用して,簡潔に述べなさい.
(5) 「地点 W, X, Y, Z に列車が無ければ,各地点で確認すべき各信号 P, Q, R, S は,この順で,無意味である」を「 W =0 ならば信号 P はドントケア"−",同様に,X =0 ならば信号 Q はドントケア"−",Y =0 ならば信号 R はドントケア"−",Z =0 ならば信号 S はドントケア"−"」($)とできる.この論理関係($)で(1)を修正して,下記の真理値表の P, Q, R, S 列(右4列)を埋めなさい.
(6) (5)の真理値表から各出力 P, Q, R, S を解答欄のカルノー図に写し,それを用いて各出力 P, Q, R, S を2段論理最小化し,最小積和形論理式で示しなさい.カルノー図による操作はすべて解答として明記しなさい.
(7) 「W, X, Y, Z のすべての地点にも列車が存在する(有る,"1")場合,信号 P, Q, R, S はすべて"0"(赤)になり,どの列車も停止したまま進行できない」という状態(「デッドロック」という)に陥る. この「デッドロック状態」の条件と結果を示す論理関係を簡潔な論理式で示しなさい.
(8) (2)と(6)の結果を比較して得る「各地点での列車(の有無)と信号との論理関係」(制御規則A以外で)について,簡潔な日本語で述べなさい.
[B] 図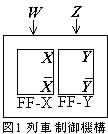 Bは,図Aから4台の信号を取り除いた外は列車や線路に関する仕様(#)が図Aとまったく同じ,
Bは,図Aから4台の信号を取り除いた外は列車や線路に関する仕様(#)が図Aとまったく同じ,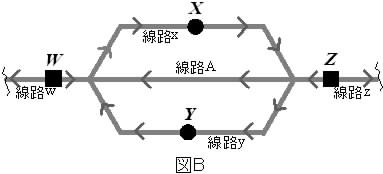 連結単線線路 A, w, x, y, z である.今度は,ある時刻(ビットタイム) t での地点 W, X, Y, Z における列車の有無のみで,次時刻 t+ での地点 X+, Y+ での列車の有無(進行状況)を集中制御・指令する自動列車制御機構について考える.この列車制御機構を「入力を W, Z ,状態を2個のフリップフロップ(FF-X, FF-Y)の状態(出力) X, Y とする同期式順序回路」(図1 )として最適化設計してみよう. すなわち,この順序回路では,入力 W, Z と現状態 X, Y だけで,次状態 X+, Y+ への状態遷移を決定する.そして,入力 i を i0, i1, i2, i3 と記号で表現し,この順で,入力 WZ =00 (W=0, Z=0,以下同様), 01, 10, 11 に割り当てる.また,現状態 s と次状態 s+ を s0, s1, s2, s3 と記号で表現し,この順で,FF-X,Yの各状態(出力) XY =00 (X=0, Y=0,以下同様), 01, 10, 11 に割り当てる(状態割り当て).ここで,「仕様(#)の下で列車を制御すると,記号表現による状態遷移図が右図となる」ように,この列車制御機構を設計する.次の(1)〜(7)の各問に答えなさい.(論理積(AND)記号"・"は省略しなさい.)
連結単線線路 A, w, x, y, z である.今度は,ある時刻(ビットタイム) t での地点 W, X, Y, Z における列車の有無のみで,次時刻 t+ での地点 X+, Y+ での列車の有無(進行状況)を集中制御・指令する自動列車制御機構について考える.この列車制御機構を「入力を W, Z ,状態を2個のフリップフロップ(FF-X, FF-Y)の状態(出力) X, Y とする同期式順序回路」(図1 )として最適化設計してみよう. すなわち,この順序回路では,入力 W, Z と現状態 X, Y だけで,次状態 X+, Y+ への状態遷移を決定する.そして,入力 i を i0, i1, i2, i3 と記号で表現し,この順で,入力 WZ =00 (W=0, Z=0,以下同様), 01, 10, 11 に割り当てる.また,現状態 s と次状態 s+ を s0, s1, s2, s3 と記号で表現し,この順で,FF-X,Yの各状態(出力) XY =00 (X=0, Y=0,以下同様), 01, 10, 11 に割り当てる(状態割り当て).ここで,「仕様(#)の下で列車を制御すると,記号表現による状態遷移図が右図となる」ように,この列車制御機構を設計する.次の(1)〜(7)の各問に答えなさい.(論理積(AND)記号"・"は省略しなさい.)
(1) 記号表現した状態遷移図によって,下記の拡大状態遷移表の s+ 列を埋めなさい.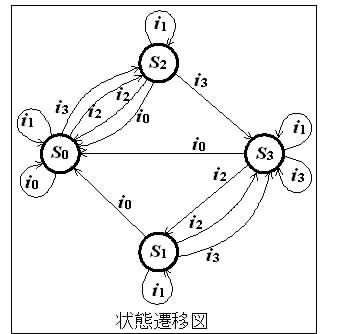 さらに,各 s+ を X+, Y+ に展開して X+, Y+ 列を埋めなさい.
さらに,各 s+ を X+, Y+ に展開して X+, Y+ 列を埋めなさい.
(2) まず,この順序回路を(2個の)D-FFによって構成する.D-FFの入力要求表は表1の通りであり,D-FFの場合には,(1)で作った拡大状態遷移表の X+, Y+ 列がそのままそれぞれ DX , DY 列となることに注意して,この拡大状態遷移表の DX , DY 列を解答欄の対応するカルノー図に写し,入力条件式 DX, DY のそれぞれを2段論理最小化し,最小積和形論理式で示しなさい. カルノー図による操作はすべて解答として明記しなさい.
(3) (2)で求めた DX , DY の各最小積和形のうちで,ファクタリングを用いて多段論理最小化できるものがあれば,それらすべて(の結果)を最小形論理式で示しなさい.
(4) 次に,この順序回路を(2個の)JK-FFによって構成する.JK-FFの入力要求表は表1の通りである.この入力要求表を用いて,(1)で作った拡大状態遷移表の右側の JX, KX, JY, KY 列を埋めて,拡大入力要求表として完成しなさい.
(5) (4)の拡大入力要求表の JX, KX, JY, KY 列を解答欄の対応するカルノー図に写し,入力条件式 JX, KX, JY, KY のそれぞれを2段論理最小化し,最小積和形論理式で示しなさい. カルノー図による操作はすべて解答として明記しなさい.
(6) (2)で求めた最小積和形論理式 DX , DY を制御入力とするD-FFで構成するAND/OR回路と,(5)で求めた最小積和形論理式 JX, KX, JY, KY を制御入力とするJK-FFで構成するAND/OR回路とについて,空間最適化の度合いの観点で2入力AND/ORゲート総数(ただし,2個のFFそのものを構成するための分は除く)によって比較することによって,「D-FF とJK-FFそれぞれ単体(1個)の機能(能力)」について,比較して論じなさい.
(7) [A]の(7)で考察した「W, X, Y, Z のすべての地点に列車が存在する(有る,"1")」場合も,[B]の列車制御機構では,(実際はともかく)仕様上では,[A]の(7)で指摘したような「デッドロック状態」は発生しない.この理由について,この順序回路を([A]の)組み合わせ回路と比較する観点で,また,状態遷移図を引用して,簡潔に述べなさい.